磁响应双面神折纸机器人 跨尺度液滴操纵的软件设计与开发
随着微流控技术、生物医学检测及微纳制造的飞速发展,对微小液滴进行精确、灵活且非接触式操纵的需求日益迫切。传统的液滴操控方法往往受限于尺度、接触污染或灵活性不足。折纸结构以其独特的空间变换能力和设计自由度,为微型机器人领域带来了革命性灵感。结合磁响应材料,折纸机器人能够实现远程、可编程的复杂运动。本文聚焦于一种创新的磁响应双面神(Janus)折纸机器人设计,并详细阐述其配套的软件设计及开发方案,旨在实现从宏观到微观的跨尺度液滴高效操纵。
一、 机器人硬件设计与工作原理
1.1 双面神折纸结构设计
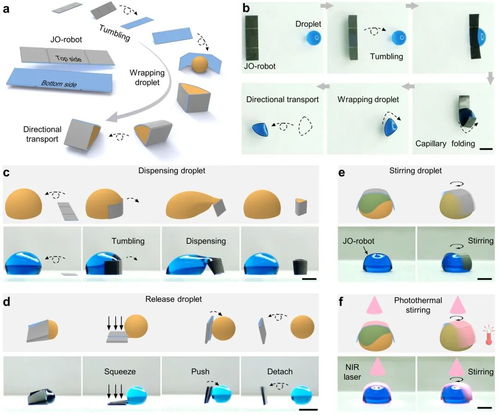
该机器人的核心是一个由磁响应智能材料(如掺杂钕铁硼颗粒的聚合物薄膜)与非响应材料不对称复合而成的双面神结构。通过精密的折纸几何设计(例如,基于Kresling、Miura-ori或水弹形变结构),该结构在外部磁场激励下,其磁响应面与非响应面会产生差异化的应变,从而驱动整个结构发生可控的折叠、展开、扭曲或滚动。这种非对称驱动赋予了机器人丰富的运动模态。
1.2 跨尺度液滴操纵机制
机器人表面经过特殊的化学修饰,使其一侧(如磁响应面)具有疏水性,另一侧具有亲水性,或具备温度响应、光响应等智能润湿特性。通过软件控制的磁场序列,机器人可以执行以下典型操作以操纵液滴:
- 运输:通过滚动或滑动,利用表面能差异推动或携带液滴移动。
- 分裂:利用其尖锐的折纸棱角或通过特定折叠动作将大液滴分割。
- 合并:将两个或多个机器人定位,使它们携带的液滴接触并融合。
- 混合:通过机器人自身的反复折叠-展开运动,扰动其承载的液滴,加速内部混合。
其“跨尺度”能力体现在:同一设计通过缩放,可适应从毫米级到微米级不同体积的液滴操作。
二、 软件系统的架构与核心模块
为实现对机器人群体和磁场生成设备的精确控制,需要开发一套集成化的软件系统。该系统主要包括以下模块:
2.1 用户交互与任务规划层
- 图形用户界面(GUI):提供直观的操作面板,用户可通过拖拽、绘制或输入坐标序列来定义液滴操纵的路径和任务(如“将A处液滴运输至B并与C合并”)。
- 任务解析与分解器:将高级别任务自动分解为一系列机器人基本动作指令序列,并考虑多机器人协作的避撞与路径规划。
2.2 运动控制与磁场生成层
- 机器人运动学模型库:内置不同折纸构型的数学模型,描述其折叠角度、位姿与施加磁场(方向、梯度、频率)的映射关系。
- 实时控制引擎:这是软件的核心。它接收动作指令,结合视觉反馈(见下文),通过算法(如PID、模型预测控制)实时计算并输出控制信号,驱动三维亥姆霍兹线圈或电磁铁阵列,生成所需的变化磁场。
- 多机器人协同调度算法:管理多个机器人同时工作,优化任务分配与执行效率。
2.3 视觉反馈与状态感知层
- 图像采集与处理模块:连接高速摄像头或显微镜,实时捕捉机器人与液滴的俯视及侧视图像。
- 机器视觉算法:集成计算机视觉库(如OpenCV),实现机器人的位姿识别、跟踪(基于标记点或轮廓)以及液滴位置、体积的实时测量。
- 状态融合与闭环反馈:将视觉信息与机器人模型结合,为控制引擎提供闭环反馈,实现精准的定位与操纵。
2.4 仿真与数字孪生层
- 物理仿真环境:基于物理引擎(如COMSOL Multiphysics用于磁场仿真,或PyBullet用于动力学仿真)建立机器人与液滴相互作用的虚拟模型。允许用户在软件中离线测试和优化控制策略,降低实验成本与风险。
- 数字孪生体:与实验平台实时同步,实现虚实映射,用于监控、预测和远程调试。
三、 关键开发技术与实现路径
3.1 技术栈选择
- 后端与核心算法:采用Python(得益于丰富的科学计算库如NumPy、SciPy和机器学习框架)或C++(追求高性能实时控制)进行开发。
- 前端GUI:可使用PyQt、Qt for Python或Web技术(如React)构建跨平台界面。
- 视觉处理:依托OpenCV、DeepLabCut(用于无标记跟踪)等。
- 仿真:集成COMSOL API或使用开源的物理引擎。
- 硬件通信:通过串口、USB或以太网与相机、磁场发生控制器通信,常用协议如Modbus、TCP/IP。
3.2 开发流程与集成
1. 需求分析与架构设计:明确从液滴任务到磁场指令的完整数据流和控制流。
2. 模块化开发:分团队并行开发任务规划、视觉识别、控制算法等核心模块。
3. 仿真验证:在数字环境中验证机器人模型和控制逻辑的正确性。
4. 单元与集成测试:对各模块及模块间接口进行测试,确保数据准确传递。
5. 硬件在环(HIL)测试:将软件与实际磁场发生器和视觉系统连接,进行半实物仿真。
6. 全系统联调与优化:引入真实机器人进行液滴操纵实验,优化算法参数和系统稳定性。
四、 应用前景与挑战
该磁响应双面神折纸机器人及其软件系统在化学高通量筛选、细胞培养与操作、芯片实验室(Lab-on-a-Chip)、定向药物输送及微反应器构建等领域具有广阔前景。
面临的挑战包括:
- 软件层面:复杂动态环境下的实时、鲁棒控制算法;多物理场(磁、流、表面张力)耦合的高保真度快速仿真。
- 系统层面:更微小尺度下的精确制造与驱动;机器人表面功能的进一步智能化与多功能集成。
结论
本文提出的磁响应双面神折纸机器人系统,结合其强大的专用软件设计,为实现智能化、可编程的跨尺度液滴操纵提供了一个极具潜力的平台。软件作为“大脑”,将用户意图转化为精确的磁场指令,并通过视觉反馈实现闭环控制,是释放折纸机器人物理设计潜力的关键。未来的工作将集中于提升软件的人工智能水平(如引入强化学习进行自适应控制)和推动其向标准化、通用化的实验自动化平台发展。
如若转载,请注明出处:http://www.bizcrossroad.com/product/68.html
更新时间:2026-06-18 11:57:00